时间:2025-07-17 11:51
人气:
作者:admin
水下环境感知对机器人操作至关重要。由于柔性传感器能够适应各种形状和表面,因此在深海生物捕获、环境检测和机械操作等科学应用中具有广泛的应用前景。然而,面对复杂的水下环境,实现水下柔性传感器以满足众多水下应用的需求仍是一项重大挑战。本文,中国科学院沈阳自动化研究所郭洪吉等研究人员在《ADVANCED MATERIALS TECHNOLOGIES》期刊发表名为“A Nanocrack-Based Graphene/PDMS-Encapsulated Medical Tape Flexible Sensor for Motion Detection of Underwater Robots”的论文,受仿生结构启发,如蝎子腿关节和荷叶表面,提出了一种基于石墨烯/聚二甲基硅氧烷(PDMS)的柔性应变传感器,其敏感性基于纳米裂纹效应。
该医用胶带纳米裂纹基传感器展现出高灵敏度(GF = 1.98)、高疏水性(接触角 = 133°)及弯曲循环稳定性(5000次循环测试后ΔR/R0 < 0.2)。此外,该传感器可应用于机器人手部实现精准姿态监测与交互感知。本研究成果为水下柔性传感提供了创新解决方案,对提升水下机器人及其他相关海洋领域的操作灵活性具有重要潜力和应用价值。
图文导读

图1、纳米裂纹敏化石墨烯/PDMS 封装医用胶带柔性应变传感器的制造工艺。
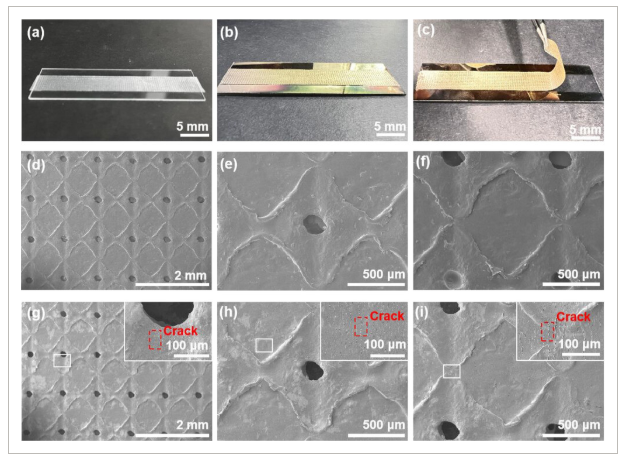
图2. 在医用胶带上制造纳米裂纹。
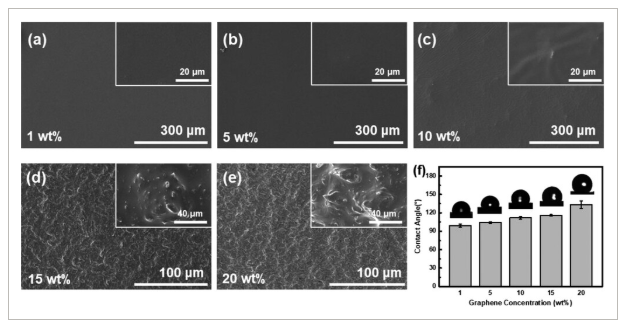
图3、不同浓度石墨烯/PDMS 的形态特征。
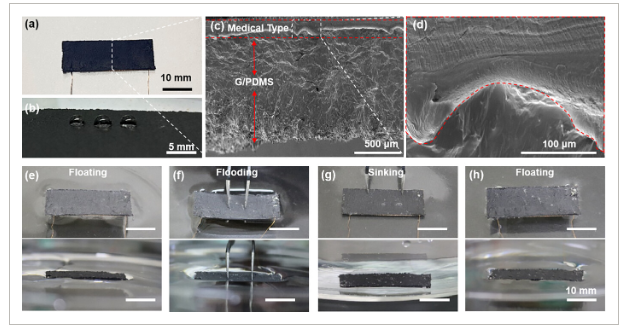
图4. NbG/PeMT 在水浸后发生变化。
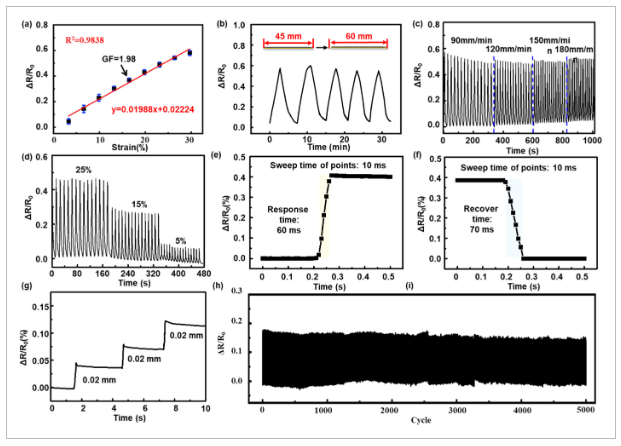
图5. 纳米裂纹敏化石墨烯/PDMS 封装的医用胶带柔性应变传感器的性能测试图像。
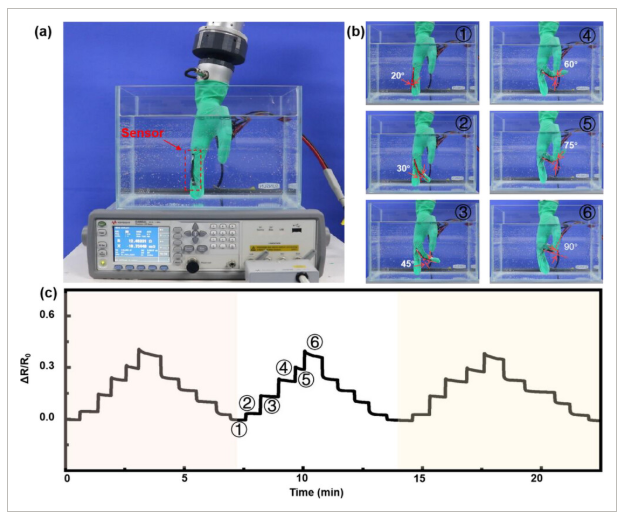
图6、NbG/PeMT集成到机械手食指的近端手指关节中。
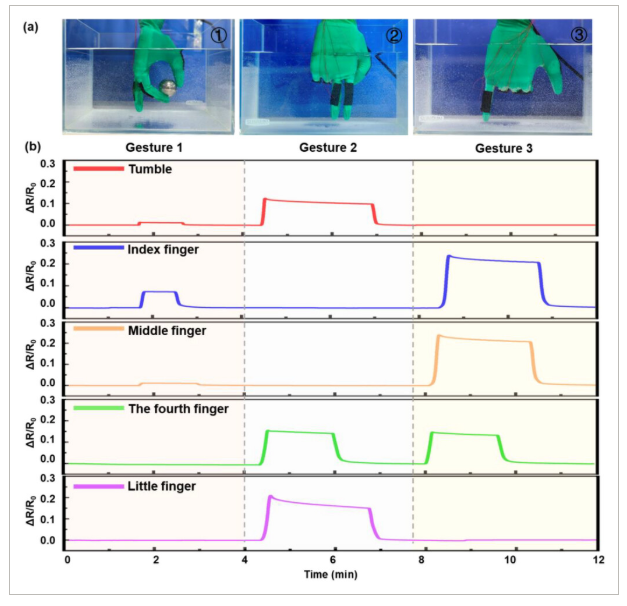
图7. NbG/PeMT的应用集成了机械手,用于不同的手势识别。
小结
一种基于纳米裂纹的石墨烯/聚二甲基硅氧烷(PDMS)封装医疗胶带柔性传感器用于水下机器人姿态检测的新型方法已被提出。该传感器的制造过程简单,适合大规模生产。其设计包括医疗胶带基底、作为电极的纳米裂纹金(Au)层,以及用于封装的石墨烯/PDMS层。实验结果表明,基于纳米裂纹的石墨烯/PDMS封装医疗胶带传感器应变测量范围可达30%,灵敏度为GF 1.98。经过5000次疲劳测试后,传感器展现出优异的稳定重复性。机器人手指姿态监测实验证实了该传感器对水下机器人手部运动状态的实时监测能力。综上所述,我们提出了一种水下柔性传感器的封装方法。本文提出的NbG/PeMT传感器具有高线性灵敏度、宽测量范围、简单结构和良好重复性,使其在水下机器人姿态监测及其他相关海洋领域具有广阔应用前景。
文献:
https://doi.org/10.1002/admt.202500620
来源:材料分析与应用

https://file.elecfans.com/web1/M00/82/2B/pIYBAFw2-D


 关注微信
关注微信